Project information
- Category: Design Project
- Required Skills: Programming (C++, Assembly, Python), report writing, application of hardware (microcontroller, unistep motor, time of flight sensor), embedded system design, integration and testing
- Project Start: January 2023
- Project End: April 2023
Project Details
Commercial Light Detection and Ranging (LIDAR) equipment is expensive and bulky. In this project I aimed to address this issue
by designing and constructing an embedded spatial measurement system that is both less expensive and more compact. The device
is more suitable for indoor exploration, navigation, and mapping and provides engineers with an easier to use system compared to the
more complex LIDAR equipment currently available.
While working on this project I learned and applied concepts regarding signal acquisition, microcontrollers, system integration,
interrupts/polling, signal transfer functions, communication protocols, data visualization, and embedded systems.
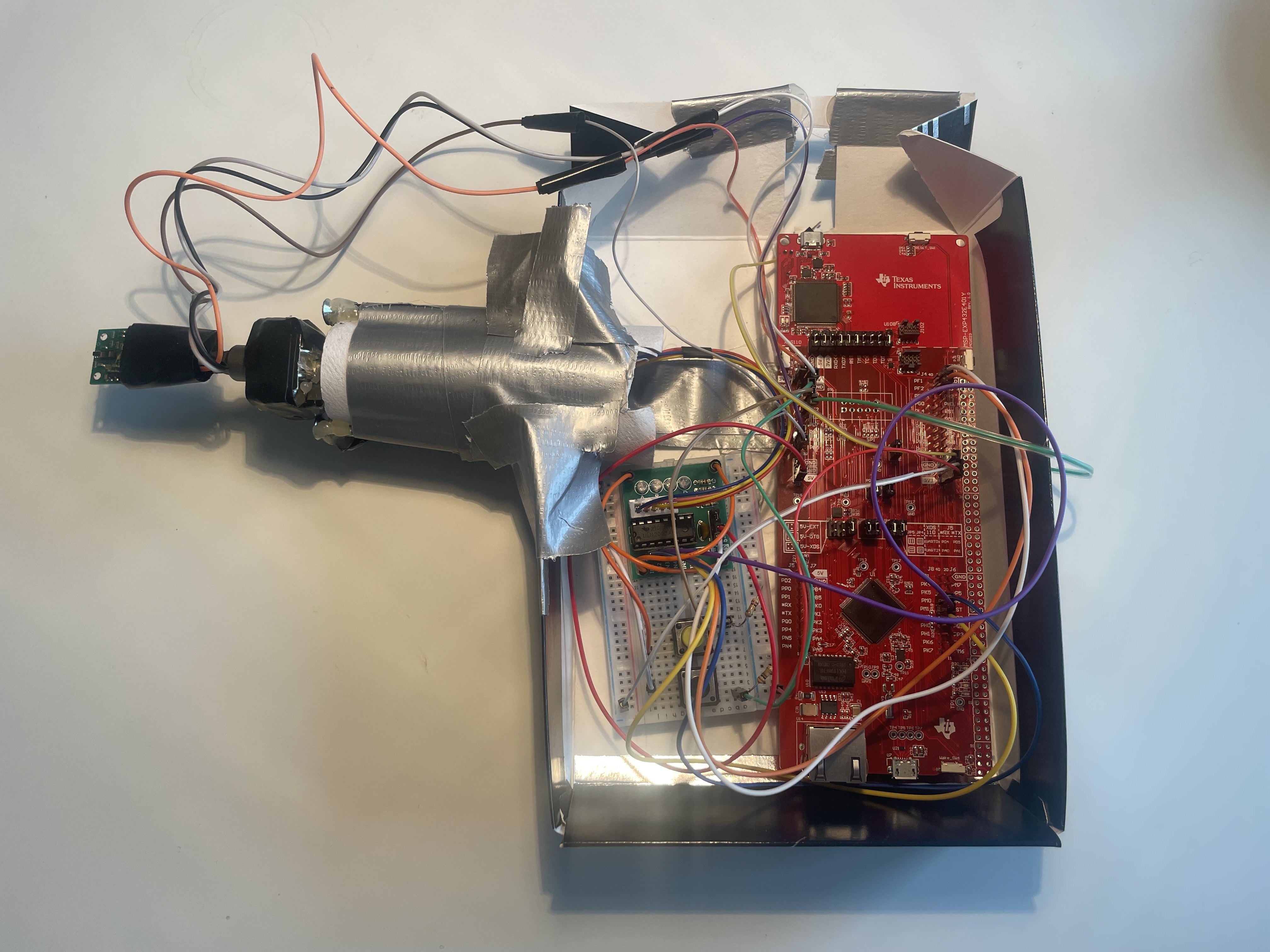
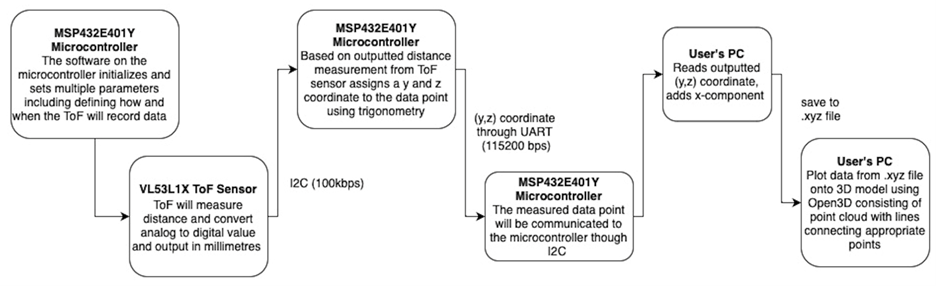
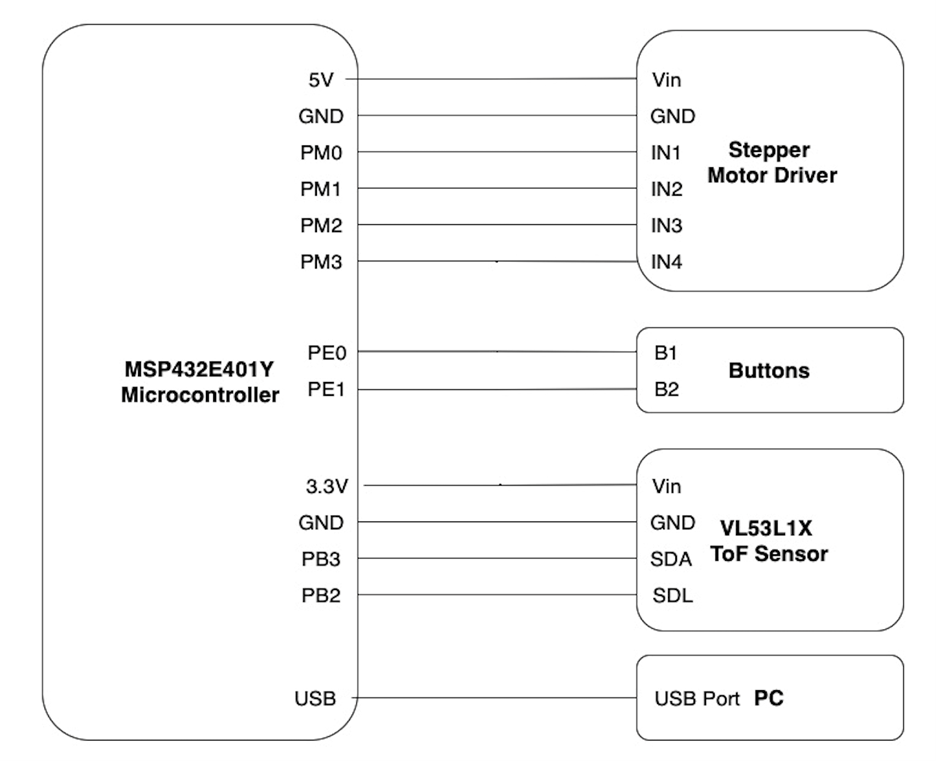
To summarize how the device works, a Time-of-Flight (ToF) sensor is attached to a unistep motor and both are controlled (through I2C)
by an MSP32E401Y Texas Instrument Microcontroller. The microcontroller is programmed in C++ and Assembly and spins the motor 360
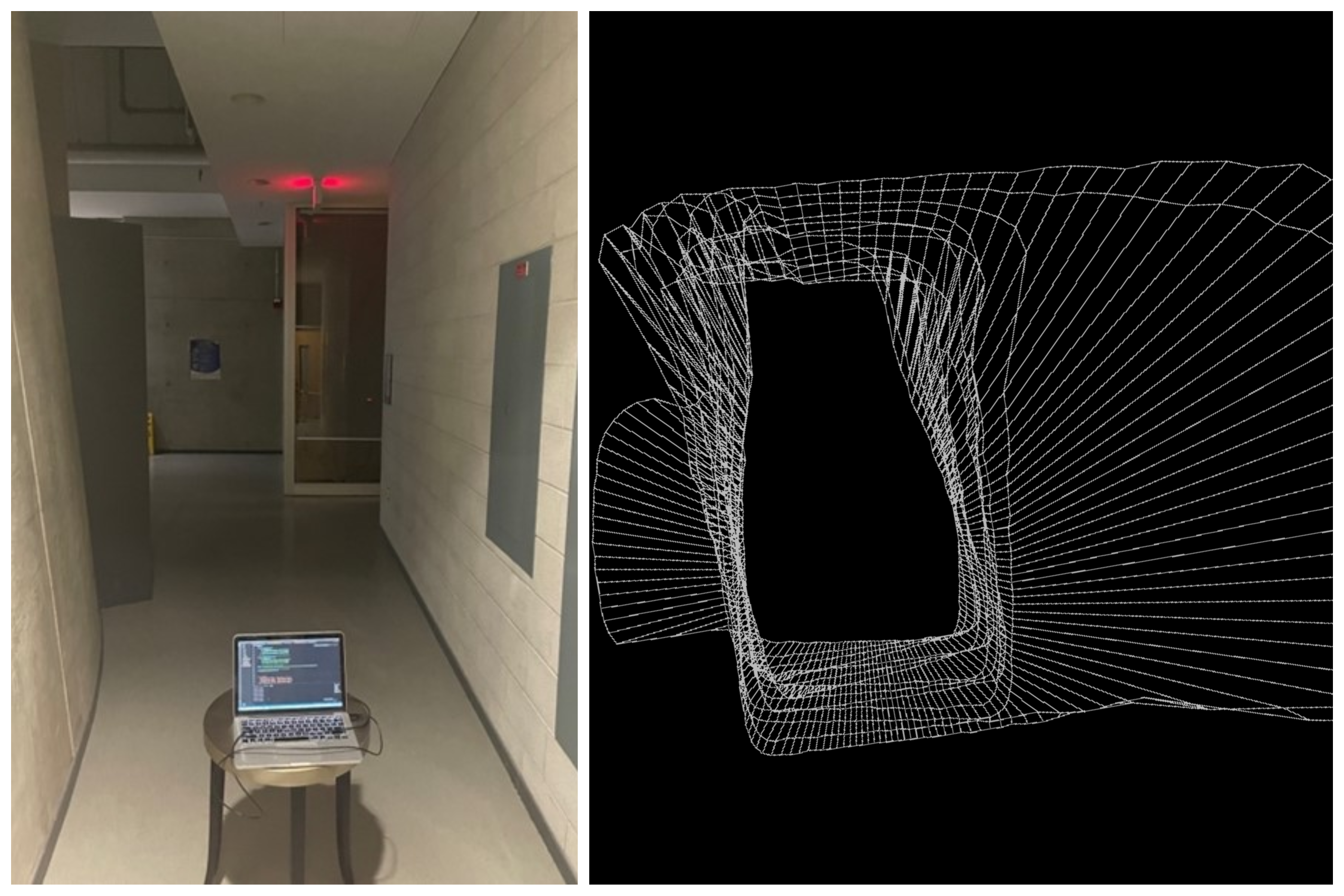
degrees while simultaneously taking a series of measurments from the ToF sensor every 2.8125 degrees. This allows the system to understand
the current y-z plane it is in and after repeating this process multiple times at different diaplcements from the starting point in
one direction the system will be able to map the entire room. The mapping is done by first communciating the data (through UART) to
a computer which runs a python program that plots the 3D space. This entire process is also controlled by two push buttons used to
turn the device on and off and pause/resume the scanning process.